
Test Question :
Jeb would like to dock his spacecraft with another ship. His problem looks very similar to the
one above, where the goal would be to align the docking clamps of his ship with the hab outside.

The problem however is that the ships are inherently a little unstable. In space, no friction exists
to slow you down. With that in mind, the transfer function for motion for a spaceship via RCS
thrusters can be represented as 2 x y systems with the transfer function form:

Which has an inherent instability. Tune 1 of these systems with a full PID.
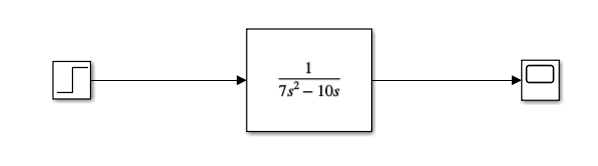
Figure 1 : block diagram without PID controller for unit step input
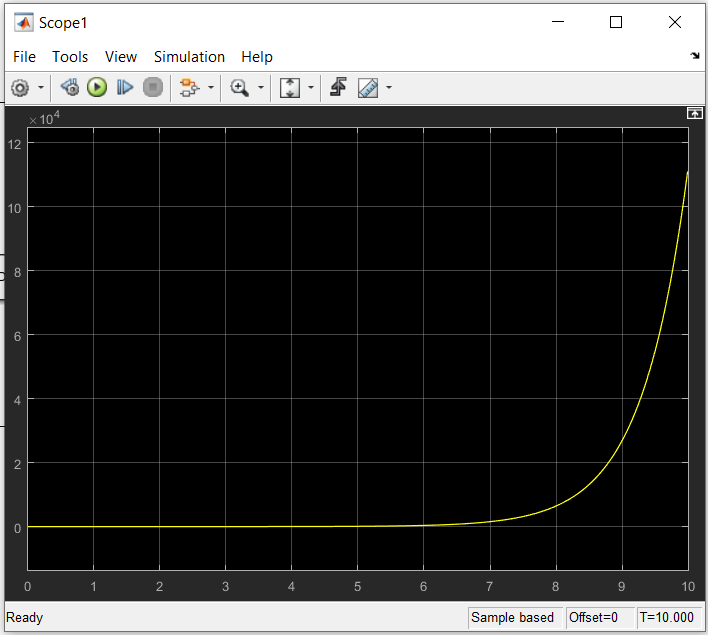
Figure 2: Step response without PID controller
a . Show the block diagram of your system (5 points)
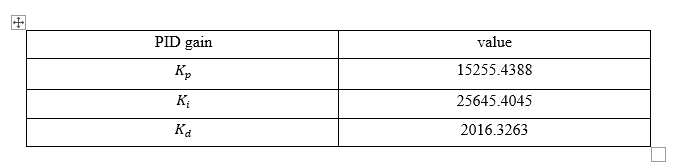
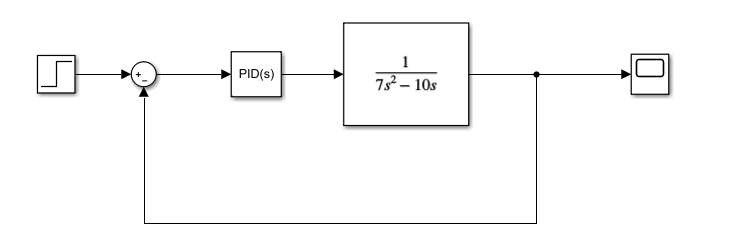 b. Tune the PID for this process and provide the step response and gains. (10 points).
b. Tune the PID for this process and provide the step response and gains. (10 points).
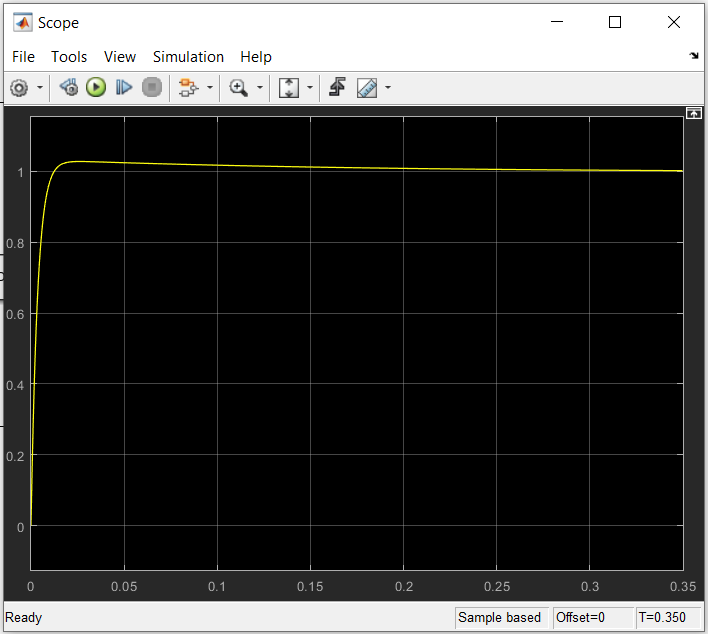
Figure 3: Step response for PID controller
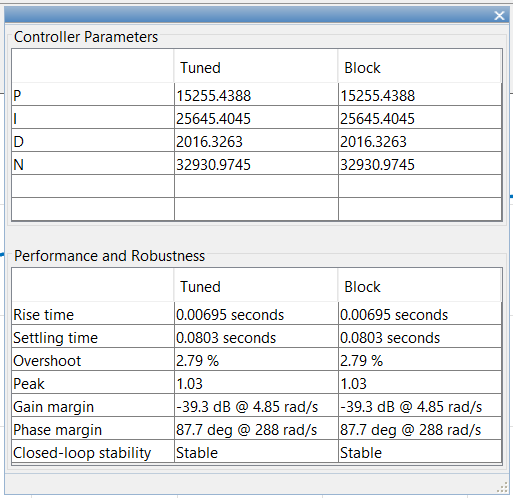
Figure 4: control parameters
c. Set the step input to 40 (in this case this would be meters) and provide the graph (5 points).
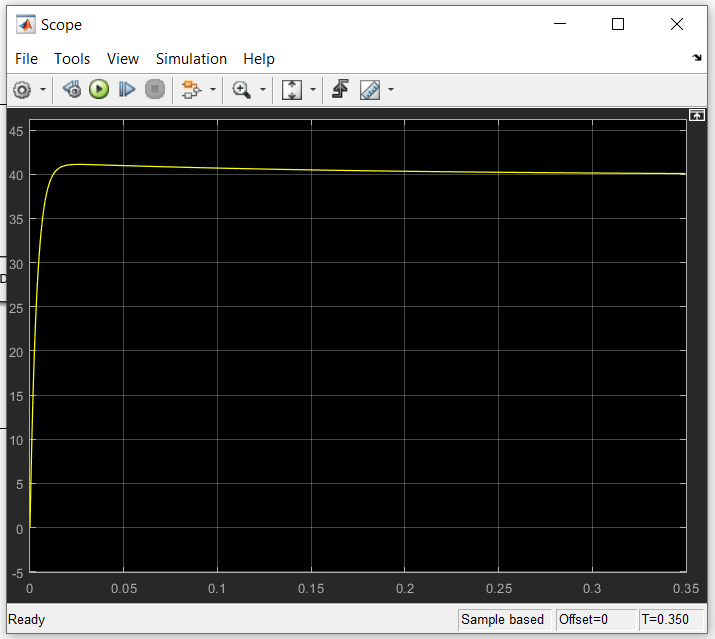
Figure 5: step response with 40 step input